CONTROL OF COOPERATIVE ROBOTICS VEHICLE USING GPS AND GIS

BY
N.S.ANANDHA KUMARAN
BY
N.S.ANANDHA KUMARAN
3rd YEAR EEE
DECENTRALISED CONTROL OF ROBOTIC VEHICLE
— Our paper describes how decentralized control theory can be used to analyze the control of multiple cooperative robotic vehicles.
— Models of cooperation are discussed and related to the input/output, structural observability and controllability of the entire system.
— Decentralized control research in the past has concentrated on using decentralized controllers to partition complex physically interconnected systems
— Our work uses decentralized methods to connect independent non touching robotic vehicles so that they behave in a stable , coordinated fashion.
— A vector Liapunov method is used to prove stability of two examples: the controlled motion of multiple vehicles along a line and the controlled motion of multiple vehicles in formation.
INRECENT years, there has been considerable interest in the control of multiple cooperative robotic vehicles, the vision being that multiple robotic vehicles can perform tasks faster and more efficiently than a single vehicle.
— This is best illustrated in a search and rescue mission where multiple robotic vehicles spread out and search for a missing aircraft
— During the search, the vehicles share information about their current location and the areas that they have already visited
— If one vehicle’s sensor detects a strong signal indicating the presence of the missing aircraft, it may tell the other vehicles to concentrate their efforts in a particular area.
— Other types of cooperative tasks range from moving large objects to troop hunting behaviors, military tasks like
Formation following,
localization of chemical sources,
demining,
Target assignments,
autonomous driving,
perimeter control,
surveillance, and
search and rescue missions
SHOWS THE FIELD IN WHICH THE SYSTEMS ARE DEPLOYED
— The strategies of cooperation encompass theories from such diverse disciplines as,
artificial intelligence
game theory/economics
theoretical biology
distributed computing/control
animal ethology and
artificial life.
— Early research concentrated on animal-like cooperative behavior.
— Motor schemas such as avoid-static-obstacle, avoid-robot, move-to-goal and maintain formation
were combined later.
— recently, researchers have begun to take a system-controls perspective and analyze the stability of multiple vehicles when driving in formations.
DISTRUBUTED ALGORITHM
— convergence of a linear swarm of asynchronous distributed autonomous agents into a synchronously achievable configuration.
— The linear swarm is modeled as a set of linear equations that are solved iteratively
— “swarm cohesiveness” is the stability property under study
— the recent research combining graph theory with decentralized controls
— methods for controlling a group of vehicles range from distributed autonomy to intelligent squad control and general purpose cooperative mission planning
— In this paper, we address the stable control of multiple vehicles using large-scale decentralized control techniques
— The analysis techniques discussed in the following sections allow the system designer to determine the required sampling periods for communication and control and the theoretical limits on the interaction gains between each vehicle
MODEL OF COOPERATION
— The function
fi: TXRniXRmi ----------à Rni describes the dynamics of Si,
the function
fi ~: TXRnXRm ----------à Rni represents the dynamic interaction of Si with the rest of the system S,
the function
hi : TXRni ------------à Rli represents observations at Si derived only from local-state variables of Si,
the function
hi : TXRn---------àRli represents observations at Si derived from the rest of S.
The independent subsystems are denoted as
Si:xi = fi (t,x,ui), i belonging to {1,…………,N}
yi = hi (t,xi) ---------------------------------(3)
— The state interconnection function for determining the input and output reachability and structural controllability and observability is ,
— Fi (t,x,u) = fi (t,ai1x1,ai2x2,……..,aiNxN,bi1u1,bi2u2,…………,biNuN)
for i belonging to {1,….,N} --------------------------(4)
• Mathematically, it is possible to check for input and output reachability using the reachability matrix
where S=n+m+l=, E^k = E^k-1#E, ‘V’ is the boolean OR operator (0V0=0,0V1=1V0=1V1=1),
‘#’ is the boolean AND operator (1#1=1,0#1=1#0=0#0=0)
• For two SXS binary matrices A=(aij) and B=(bij), the Boolean operations C=(Cij)= A#B and D=(dij)=AVB are defined by cij = V^8k=1(aik # bkj) and dij= aij V bij.
STABILITY HOUSE
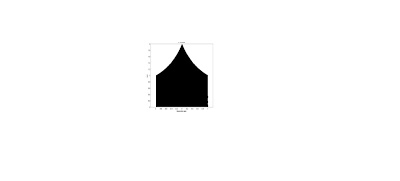
• The dark region represents stable combinations of the interaction gain and KpT (proportional control gain multiplied by the sampling period). The white region represents unstable combinations of interaction gain and KpT. We refer to the dark region as a “stability house” due to the shape of the stable zone. The size of this stability house varies only with N. As N is increased, the house gets smaller in width but maintains the same height and shape
• The size of the stability house is a measure of the robustness of the closed-loop system to parameter variations in interaction gain , sampling period T , and proportional control gain kp.
• The way to check the stability of this linear system is to check that the eigenvalues of the system matrix A are within the unit circle. There is a special Formula for the eigenvalues of A given by,

STEP RESPONSE AND MEASURE

— When more vehicles are involved, any amount of overshoot can cause the whole group to go unstable.
— if the position sampling period is much less than the communication sampling period T, then the stability region is independent of T and only dependent on the interaction gain .
— asymptotic stability of vehicle positions depends on vehicle
— responsiveness Kp, communication sampling period T, and vehicle interaction gain .
— If the vehicle is too fast or the sample period is too long then the vehicles will go unstable.
— There is a dependence on interaction gain for stability as well.
— the interaction gains can be used to bunch the vehicles closer together or spread them out.

— The stability region shrinks as the number of vehicles increases, but only to a defined limit.

RATLER(ROVING ALL-TERRAIN LUNAR EXPLORER ROVER)
— A squad of semiautonomous all-terrain vehicles was developed for remote Cooperative sensing applications
— The RATLER vehicles rely on radio frequency (RF) signals for communications
— A laptop computer is used as the base station
— Graphical User Interface (GUI) displays vehicle status information
— allows the operator to monitor the vehicles’ positions on a Geographic Information System (GIS) map
— There are two modes of communication between the base station and the vehicles:
a star network
a token-ring network
— In the star network ----- all radio communication is coordinated by the base station.
— In the token-ring network ------ each node (either vehicle or base station) speaks only when it receives the token

APPLICATION
FORMATION CONTROL
— formation control is to develop a simple user interface that allows a single operator to guide multiple robot vehicles
— each vehicle is sent a relative offset and the initial formation location command.
PERIMETER SURVEILLANCE
— robotic perimeter surveillance is to use a cooperative team of robotic sentry vehicles to investigate alarms from Miniature Intrusion Detection Sensors (MIDS)
— In our tests,
— we used four different types of MIDS including magnetometer, seismic, passive infrared, and beam-break (or active) infrared
— Once the operator places the vehicles in the MIDS sentry mode, the vehicles spread out uniformly along the perimeter maintaining equal distance between their two nearest neighbors using the control law described in the previous sections.
SURROUND TASK
An interactive playbook capability has been developed where the operator can guide individual vehicles or the entire group using drawing tools.
— The algorithm uses the distance and direction to the nearest goal, obstacle, and neighboring vehicle to determine the gradient used to update the vehicle’s position as each vehicle moves from its initial position to the closest goal.

CONCLUSION
— In this paper, decentralized control theory is applied to the control of multiple cooperative mobile robotic vehicles
— We mathematically saw how to determine if a cooperative system is input/output reachable, structurally controllable and observable, and connectively stable
— We illustrated the use of these techniques
— showed how these simple examples are applicable to multirobot formation control, perimeter surveillance, and surround problems
— The stability analysis was used to determine limits on system parameters such as the interaction gain between vehicles, on the responsiveness of the vehicles, and on the sampling period for communication and position feedback, and to see how these limits vary as a function of the number of vehicles.
BIBLIOGRAPHY
— K. Kosuge, T. Oosumi, M. Satou, K. Chiba, and K. Takeo, “Transporation of a single object by two decentralized-controlled nonholonomic mobile robots,” in Proc. Conf. Robotics and Automation, Leuven, Belgium, May 1998, pp. 2989–2994.
— H. Yamaguchi, “A cooperative hunting behavior by mobile robot troops,” in Proc. Conf. Robotics and Automation, Leuven, Belgium, May 1998, pp. 3204–3209.
— www.ingentaconnect.com/content/klu/jint/2004
— http://www.robotics.mit.edu/
— http://www.cs.cmu.edu/
— www.books.nap.edu/openbook.php
— http://www.springerlink.com/

No comments:
Post a Comment